Принцип действия двигателя постоянного тока
 Устройство, которое преобразует электрическую энергию в механическую, может использоваться как двигатель или генератор, так как конструкция и принцип действия двигателя постоянного тока (ДПТ) аналогична конструкции генератора. Особенностью ДПТ является механический инвертор (коммутатор). Этот коммутатор имеет скользящие контакты в виде щёток, которые расположены так, что они изменяют полярность обмоток якоря (катушек) во время вращательного движения.
Устройство, которое преобразует электрическую энергию в механическую, может использоваться как двигатель или генератор, так как конструкция и принцип действия двигателя постоянного тока (ДПТ) аналогична конструкции генератора. Особенностью ДПТ является механический инвертор (коммутатор). Этот коммутатор имеет скользящие контакты в виде щёток, которые расположены так, что они изменяют полярность обмоток якоря (катушек) во время вращательного движения.
- Особенности и устройство ДПТ
- История изобретения
- Конструкция двигателя
- Принцип действия и использование
- Настройка скорости
- Современное применение
Особенности и устройство ДПТ
ДПТ представляет собой вращающуюся электрическую машину, работающую от постоянного тока. В зависимости от направления потока мощности проводится различие между двигателем (электродвигатель с электрической и механической мощностью) и генератором (электрический генератор, на который подаётся механическая мощность, а также электроэнергия). ДПТ могут запускаться под нагрузкой, их скорость легко изменить. В режиме генератора ДПТ преобразует напряжение переменного тока, подаваемое ротором, в пульсирующее постоянное напряжение.
История изобретения
Основываясь на развитии первых гальванических элементов в первой половине XIX века, первыми электромеханическими преобразователями энергии были машины постоянного тока. Первоначальная форма электродвигателя была разработана в 1829 году, а в 1832 году француз Ипполит Пиксии построил первый генератор. Антонио Пачинотти построил в 1860 году электродвигатель постоянного тока с многокомпонентным коммутатором. Фридрих фон Хефнер-Алтенек разработал барабанный якорь в 1872 году, который открыл возможность промышленного использования в области крупномасштабного машиностроения.
В последующие десятилетия такие машины из-за развития трехфазного переменного тока потеряли свою значимость в крупномасштабном машиностроении. Синхронные машины и системы с низким уровнем обслуживания асинхронного двигателя заменили их во многих устройствах.
Конструкция двигателя
Чтобы понять принцип действия ДПТ, нужно сначала изучить его конструктивные особенности, одной из которых является то, что в магнитном поле постоянного магнита установлен вращающийся проводящий контур.

Упрощая эту структуру, можно сказать, что двигатель состоит из двух основных компонентов:
- Основной магнит (постоянный магнит), который прикреплён к статору. Магнитное поле также может быть электрически сгенерировано. На статоре находятся так называемые возбуждающие обмотки (катушки).
- Проводящая петля (арматура) на сердечнике якоря, обычно состоящая из слоистых металлических листов.
Обе конструкции называются двигателями постоянного тока с внешним возбуждением. Электродинамический закон указывает, что токопроводящая петля проводника в магнитном поле представляет собой силу [F], зависящую от тока [I] и напряжённости магнитного поля [B]. Токопроводящий проводник окружен круговым магнитным полем. Если объединить магнитное поле магнитного поля с магнитным полем проводящей петли, можно обнаружить суперпозицию двух полей, а также результирующий силовой эффект.
Обмотка якоря состоит из двух половин катушки. Если применить напряжение постоянного тока к двум концам обмотки якоря, можно представить, что движущиеся носители заряда поступают в нижнюю половину катушки из верхней половины катушки.

Каждая токопроводящая катушка развивает собственное магнитное поле, и магнитное поле постоянного магнита накладывается на магнитное поле нижней половины катушки и поле верхней половины катушки. Линии поля постоянного магнитного поля всегда одного направления, они всегда показывают с севера на южный полюс. Напротив, поля двух половин катушки имеют противоположные направления.
В левой части поля половины катушки полевые линии поля возбудителя и поля катушки имеют одно и то же направление. Благодаря этому силовому эффекту в противоположном направлении на нижнем и верхнем концах арматуры создаётся крутящий момент, который вызывает вращательное движение якоря.
Якорь представляет собой так называемый двутавровый якорь. Эта конструкция получила название из-за своей формы, которая напоминает два составных «Т». Катушки якоря соединены с платами коммутатора (коллектора). Подача тока в обмотке якоря обычно осуществляется через угольные щётки, которые обеспечивают скользящий контакт с вращающимся коммутатором и подают катушкам электричество. Щётки изготавливаются из самосмазывающихся графитов, частично смешанных с медным порошком для небольших двигателей.
Принцип действия и использование
Это устройство представляет собой электромашину, которая преобразовывает электрическую энергию в механическую. Принцип работы двигателя постоянного тока заключается в том, что всякий раз, когда проводник, переносимый током, помещается в магнитное поле, он испытывает механическую силу.
 Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента.
Постоянный магнит преобразовывает электрическую энергию в механическую через взаимодействие двух магнитных полей. Одно поле создаётся сборкой постоянными магнитами, другое — электрическим током, протекающим в обмотках двигателя. Эти два поля приводят к крутящему моменту, который имеет тенденцию вращать ротор. Когда ротор вращается, ток в обмотках коммутируется, обеспечивая непрерывный выход крутящего момента.
Коммутатор состоит из проводящих сегментов (стержней) из меди, которые представляют собой завершение отдельных катушек проволоки, распределённых вокруг арматуры. Вторая половина механического выключателя комплектуется щётками. Эти щётки обычно остаются неподвижными с корпусом двигателя.
По мере прохождения электрической энергии через щётки и арматуру создаётся крутильная сила в виде реакции между полем двигателя и якорем, вызывающим поворот якоря двигателя. Когда арматура поворачивается, щётки переключаются на соседние полосы на коммутаторе. Это действие переносит электрическую энергию на соседнюю обмотку и якорь.
Движение магнитного поля достигается переключением тока между катушками внутри двигателя. Это действие называется коммутацией. Очень многие двигатели имеют встроенную коммутацию. Это означает, что при вращении двигателя механические щётки автоматически коммутируют катушки на роторе.
Настройка скорости
ДПТ можно легко регулировать. Скорость можно изменить с помощью следующих переменных:
 Напряжение якоря U_A (управление напряжением).
Напряжение якоря U_A (управление напряжением).- Основной поток поля (полевое управление), сила магнитного поля.
- Анкерное сопротивление.
 Напряжение якоря U_A (управление напряжением).
Напряжение якоря U_A (управление напряжением).Простейшим методом управления скоростью вращения является управление приводным напряжением. Чем выше напряжение, тем выше скорость, которую двигатель пытается достичь. Во многих приложениях простое регулирование напряжения может привести к большим потерям мощности в цепи управления, поэтому широко используется метод широтно-импульсной модуляции.
В основном способе с широтно-импульсной модуляцией рабочая мощность включается и выключается для модуляции тока. Отношение времени включения к «выключенному» времени определяет скорость двигателя.
Электродвигатель с внешним возбуждением легко контролировать, поскольку токи через обмотки якоря и статора можно контролировать отдельно. Поэтому такие двигатели имели определённое значение, особенно в области высоко динамичных приводных систем, например, для привода станков с точной регулировкой скорости и крутящего момента.
Современное применение
ДПТ используются в различных областях.

Он является важным элементом в различных продуктах:
- игрушках;
- сервомеханических устройствах;
- приводах клапанов;
- роботах;
- автомобильной электронике.
Высококачественные предметы повседневного назначения (кухонные приборы) используют серводвигатель, известный как универсальный двигатель. Эти универсальные двигатели являются типичными ДПТ, в которых стационарные и вращающиеся катушки представляют собой последовательные провода.
masterok
 masterok
masterok Мастерок.жж.рф
Хочу все знать

Дорогие мои читатели, начинаем разбирать темы августовского стола заказов (боже мой, как быстро летит время!). Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов. Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать.
Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую.
В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря.
Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину.
В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам:
- расширение применения электродвигателей находится в прямой зависимости от удешевления электрической энергии, т. е. от создания генератора, более экономичного, чем гальванические элементы;
- электродвигатели должны иметь по возможности малые габариты, большую мощность ибольший коэффициент полезного действия;
- этап в развитии электродвигателей связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом.
Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока.
В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался.
В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями.
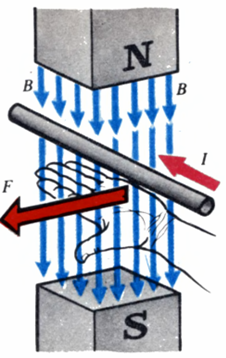
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
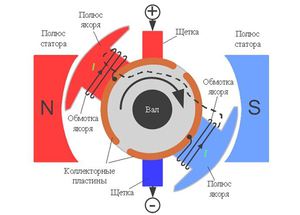
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
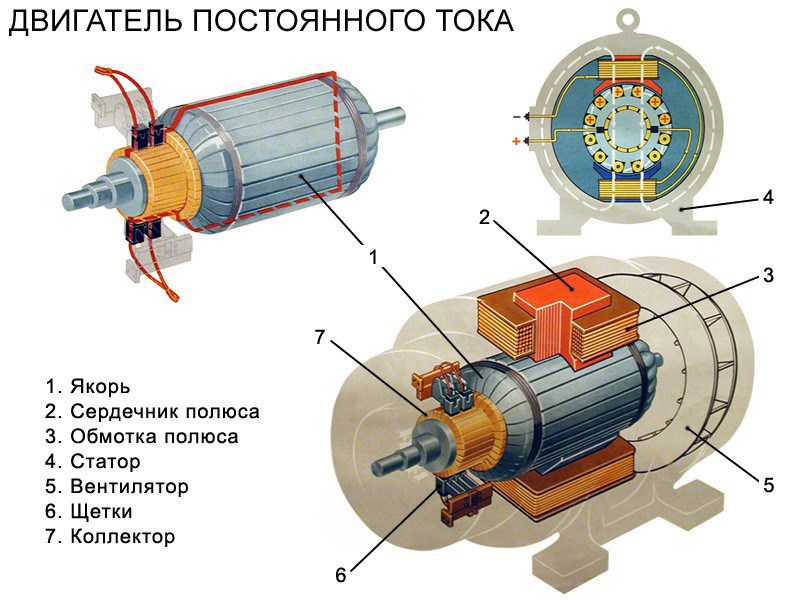
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах – специальная обмотка, служащая для улучшения условий коммутации.

Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях).
Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины.
Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса.
Рис. 2. Упрощенное изображения коллектора
Рис. 3. Выпрямление переменного тока с помощью коллектора
Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось.
В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет.
В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.

Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Принцип работы:
Сборка двигателя постоянного тока ПО ДЕТАЛЯМ:
Принцип действия и устройство электродвигателя постоянного тока
Содержание
- Краткая история создания
- Принцип действия электродвигателя постоянного тока
- Устройство электродвигателя постоянного тока
- Особенности и характеристики электродвигателя постоянного тока
Сейчас невозможно представить нашу жизнь без электродвигателей. Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом. Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию. Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита. Но одна рамка после определенного количества вращений замирает в положении, параллельном внешнему магнитному полю. Для продолжения движения необходимо добавить вторую рамку и в определенный момент переключить направление тока.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников. Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом. Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Устройство электродвигателя постоянного тока
Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией.
Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором.
В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах.
Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке.
Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями.
Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.
Особенности и характеристики электродвигателя постоянного тока
Эксплуатационные характеристики электродвигателя постоянного тока позволяют широко использовать это устройство в самых разных сферах – от бытовых приборов до транспорта. К его преимуществам можно отнести:
- Экологичность. При работе не выделяются вредные вещества и отходы.
- Надежность. Благодаря довольно простой конструкции он редко ломается и служит долго.
- Универсальность. Он может использоваться в качестве как двигателя, так и генератора.
- Простота управления.
- Возможность регулирования частоты и скорости вращения вала – достаточно подключить агрегат в цепь переменного сопротивления.
- Легкость запуска.
- Небольшие размеры.
- Возможность менять направление вращения вала. В двигателе с последовательным возбуждением нужно изменить направление тока в обмотке возбуждения, во всех остальных типах – в якоре.
Как и любое устройство, электродвигатели постоянного тока имеют и «слабые стороны»:
- Их себестоимость, следовательно, и цена достаточно высока.
- Для подключения к сети необходим выпрямитель тока.
- Самая уязвимая и быстроизнашивающаяся деталь – щетки – требует периодической замены.
- При сильной перегрузке может случиться возгорание. Если соблюдать правила эксплуатации, такая возможность исключена.
Но, как видите, достоинства явно перевешивают, поэтому на данный момент электродвигатель является одним из наиболее экономичных и эффективных устройств. Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
Электродвигатель постоянного тока
Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока.
Подробно о классификации и принципах работы электрических моторов, рекомендуем прочитать в нашей отдельной статье.

История изобретения
Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле. Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики.
Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом:
- После подачи питания вокруг якоря-ротора создавалось электромагнитное поле, чьи полюса располагались напротив друг друга по правилу буравчика и отклонялись от одноименных полюсов индуктора.
- Перед тем, как электромагнитное поле якоря устанавливалось на максимальном приближении к разноименным полюсам индуктора, специальный коммутатор отключал питание, и якорь продолжал вращаться по инерции.
- После того, как якорь выходил из-под полюсов индуктора, коммутатор включал питание с обратной полярностью и появившееся «перевернутое» электромагнитное поле отталкивалось от полюсов индуктора, делая полный оборот якоря.
Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес.
Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты.
В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока.

Устройство и принцип работы
В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места.
Основной принцип
Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя:
- Подача питания создает на обмотках якоря электромагнитное поле.
- Полюса электромагнитного поля отталкиваются от одноименных полюсов поля постоянного магнита.
- Якорь вместе с валом, на котором он закреплен, вращается в соответствии с отталкивающимся полем обмотки.
Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины:
- Мертвое положение, из которого двигатель невозможно запустить – когда полюса точно сориентированы друг перед другом.
- Невозможность пуска из-за сильного сопротивления или слабого отталкивания полюсов.
- Ротор останавливается после совершения одного оборота. Это связано с тем, что после прохождения половины окружности притягивание магнита не разгоняло, а тормозило вращение ротора.
Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени.
Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности.
Проблема слабых пусковых токов рассматривается ниже в отдельном разделе.
Конструкция
Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из:
- Коллектора. Он представляет собой токосъемное кольцо из нескольких секций, разделенных диэлектрическим материалом, подключается к обмоткам якоря и крепится непосредственно на валу двигателя.
- Графитовых щеток. Они замыкают цепь между коллектором и источником питания с помощью щеток, которые прижимаются к контактным площадкам коллектора прижимными пружинами.
Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка.
Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций:
- В этом примере мы будет считать стартовым положением ротора то, которое нарисовано на схеме. Итак, после подачи питания на нижнюю щетку, помеченную знаком «+», ток протекает по обмотке и создает вокруг нее электромагнитное поле.
- По правилу буравчика в левой нижней части формируется северный полюс якоря, а на правой верхней – южный. Располагаясь вблизи одноименных полюсов статора, они начинают отталкиваться, приводя тем самым ротор в движение, которое продолжается до тех пор, пока противоположные полюса не окажутся на минимальном друг от друга расстоянии, то есть придут в окончательное положение (рис. 1).
- Конструкция коллектора на данном этапе приведет к переключению полярности на обмотках якоря. В результате этого полюса магнитных полей снова окажутся на близком расстоянии и начнут отталкиваться.
- Ротор совершает полный оборот, и коллектор снова меняет полярность, продолжая его движение.

Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение.
В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе.
Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря».
Пусковые токи
Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям:
- защитный автомат линии не выдержит тока и отключится;
- провода обмотки сгорят от перегрузки;
- секторы переключения на коллекторе приварятся от перегрева.
Поэтому такое решение можно назвать скорее рискованной полумерой.
Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны.
Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач:
- Сначала ток постепенно поднимается до пускового значения.
- После «сдвига» с места значение тока резко падает и снова плавно поднимается «подгоняя вращение вала».
- После подъема до предельного значения сила тока снова снижается и «подгоняется».
Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется.
Схемы подключения
Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток.
У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения.
Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока:
- Последовательное возбуждение используется в моторах, от которых требуется большая сила тока на старте (электрический транспорт, прокатное оборудование и т.п.). Данная схема предусматривает последовательное подключение ОВ и якоря к источнику. После подачи напряжения по обмоткам якоря и ОВ проходят токи одинаковой величины.Следует учитывать, что снижение нагрузки на вал даже на четверть при последовательном возбуждении приведет к резкому повышению оборотов, что может привести к поломке двигателя, поэтому эта схема и используется в условиях постоянной нагрузки.
- Параллельное возбуждение применяется в моторах, обеспечивающих работу станкового, вентиляторного и прочего оборудования, которое в момент пуска не оказывает высокую нагрузку на вал. В этой схеме для возбуждения ОВ используется независимая обмотка, регулируемая, чаще всего, реостатом.
- Независимое возбуждение очень схоже с параллельным, но в данном случае для подачи питания ОВ используется независимый источник, что исключает появление электрической связи между якорем и обмоткой возбуждения.
В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных.
Регулировка скорости вращения
Способ регулирования оборотов ДПТ зависит от схемы его подключения:
- В моторах с параллельным возбуждением снижение оборотов относительно номинала можно производить изменяя напряжение якоря, а повышение – ослабляя поток возбуждения. Для увеличения оборотов (не более чем в 4 раза относительно номинальной величины) в цепь ОВ добавляется реостат.
- При последовательном возбуждении регулировка легко осуществляется переменным сопротивлением в цепи якоря. Правда этот метод подходит только для снижения оборотов и лишь в соотношениях 1:3 или 1:2 (кроме того, это приводит к большим потерям в реостате). Повышение осуществляется с помощью регулировочного реостата в цепи ОВ.
Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления.
Реверсирование
Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо:
- при последовательном возбуждении – просто изменить полярность входных контактов;
- при смешанном и параллельном возбуждении – необходимо менять направление тока в обмотке якоря; разрыв ОВ может привести к критическому повышению нагнетаемой электродвижущей силы и пробою изоляции проводов.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.

Достоинства и недостатки
Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока.
- ДПТ незаменимы в ситуациях, когда необходим сильный пусковой момент;
- скорость вращения якоря легко регулируется;
- двигатель постоянного тока является универсальной электрической машиной, то есть может применяться в качестве генератора.
- ДПТ имеют высокую производственную стоимость;
- использование щеточно-коллекторного узла приводит к необходимости частого техобслуживания и ремонта;
- для работы нужен источник постоянного тока или выпрямители.
Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы.
Электродвигатели постоянного тока
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Как устроены электродвигатели постоянного тока
Работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. Из основ электротехники известно, что на проводник с током, помещенный в магнитное поле, действует сила, определяемая по правилу левой руки :
где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводится электродвижущая сила, которая по отношению к току в проводнике направлена против него, поэтому он а называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
 Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря , разделенных воздушным зазором.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря , разделенных воздушным зазором.
Индуктор электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах – специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов , рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянного тока .
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях , которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя .
Коммутация в электродвигателях постоянного тока
В процессе работы электродвигателя постоянного тока щетки, скользя по поверхности вращающегося коллектора, последовательно переходят с одной коллекторной пластины на другую. При этом происходит переключение параллельных секций обмотки якоря и изменение тока в них. Изменение тока происходит в то время, когда виток обмотки замкнут щеткой накоротко. Этот процесс переключения и явления, связанные с ним, называются коммутацией .
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток. Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.

Способы возбуждения электродвигателей постоянного тока
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя . Схемы возбуждения электродвигателей постоянного тока показаны на рисунке .
Схемы возбуждения электродвигателей постоянного тока: а – независимое, б – параллельное, в – последовательное, г – смешанное
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы :
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Типы двигателей постоянного тока
Двигатели постоянного тока прежде всего различаются по характеру возбуждения. Двигатели могут быть независимого, последовательного и смешанного возбуждения. Параллельное возбуждение можно не рассматривать. Даже если обмотка возбуждения подключается к той же сети, от которой питается цепь якоря, то и в этом случае ток возбуждения не зависит от тока якоря, так как питающую сеть можно рассматривать как сеть бесконечной мощности, а ее напряжение постоянным.
Обмотку возбуждения всегда подключают непосредственно к сети, и поэтому введение добавочного сопротивления в цепь якоря не оказывает влияния на режим возбуждения. Той специфики, которая существует при параллельном возбуждении в генераторах, здесь быть не может.
В двигателях постоянного тока малой мощности часто используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом существенно упрощается схема включения двигателя, уменьшается расход меди. Следует однако иметь в виду, что, хотя обмотка возбуждения исключается, габариты и масса магнитной системы не ниже, чем при электромагнитном возбуждении машины.
Свойства двигателей в значительной мере определяются их системой возбуждения.
Чем больше габариты двигателя, тем, естественно, больше развиваемый им момент и соответственно мощность. Поэтому при большей скорости вращения и тех же габаритах можно получить большую мощность двигателя. В связи с этим, как правило, двигатели постоянного тока, особенно малой мощности, проектируются на большую частоту вращения – 1000-6000 об/мин.
Следует, однако, иметь в виду, что скорость вращения рабочих органов производственных машин существенно ниже. Поэтому между двигателем и рабочей машиной приходится устанавливать редуктор. Чем больше скорость двигателя, тем более сложным и дорогим получается редуктор. В установках большой мощности, где редуктор представляет собой дорогостоящий узел, двигатели проектируются на существенно меньшие скорости.
Следует еще иметь в виду, что механический редуктор всегда вносит значительную погрешность. Поэтому в прецизионных установках желательно использовать тихоходные двигатели, которые можно было бы сочленить с рабочими органами либо напрямую, либо посредством простейшей передачи. В связи с этим появились так называемые высокомоментные двигатели на низкие скорости вращения. Эти двигатели нашли широкое применение в металлорежущих станках, где сочленяются с органами перемещения без каких-либо промежуточных звеньев посредством шарико-винтовых передач.
Электрические двигатели отличаются также по конструктивным при знакам, связанным с условиями их работы. Для нормальных условий используются так называемые открытые и защищенные двигатели, охлаждаемые воздухом помещения, в котором они устанавливаются.
Воздух продувается через каналы машины посредством вентилятора, размещенного на валу двигателя. В агрессивных средах используются закрытые двигатели, охлаждение которых осуществляется за счет внешней ребристой поверхности или наружного обдува. Наконец, выпускаются специальные двигатели для взрывоопасной среды.
Специфические требования к конструктивным формам двигателя предъявляются при необходимости обеспечения высокого быстродействия — быстрого протекания процессов разгона, торможения. В этом случае двигатель должен иметь специальную геометрию – малый диаметр якоря при большой его длине.
Для уменьшения индуктивности обмотки ее укладывают не в пазы, а на поверхность гладкого якоря. Крепится обмотка клеющими составами типа эпоксидной смолы. При малой индуктивности обмотки существенно улучшаются условия коммутации на коллекторе, отпадает необходимость в дополнительных полюсах, может быть использован коллектор меньших размеров. Последнее дополнительно уменьшает момент инерции якоря двигателя.
Еще большие возможности для снижения механической инерции дает использование полого якоря, представляющего собой цилиндр из изоляционного материала. На поверхности этого цилиндра располагается обмотка, изготовляемая печатным способом, штамповкой или из про волоки по шаблону на специальном станке. Крепление обмотки осуществляется клеющими материалами.
Внутри вращающегося цилиндра располагается стальной сердечник, необходимый для создания путей прохождения магнитного потока. В двигателях с гладким и полым якорями вследствие увеличения зазоров в магнитной цепи, обусловленного внесением в них обмотки и изоляционных материалов, требуемая намагничивающая сила для проведения необходимого магнитного потока существенно возрастает. Соответственно магнитная система получается более развитой.
К числу малоинерционных двигателей относятся также двигатели с дисковыми якорями. Диски, на которые наносятся или наклеиваются обмотки, изготовляются из тонкого изоляционного материала, не подверженного короблению, например из стекла. Магнитная система при двухполюсном исполнении представляет собой две скобы, на одной из которых размещены обмотки возбуждения. В связи с малой индуктивностью обмотки якоря машина, как правило, не имеет коллектора и съем тока осуществляется щетками непосредственно с обмотки.
Следует еще упомянуть о линейном двигателе, обеспечивающем не вращательное движение, а поступательное. Он представляет собой двигатель, магнитная система которого как бы развернута и полюсы устанавливаются на линии движения якоря и соответствующего рабочего органа машины. Якорь обычно выполняется как малоинерционный. Габариты и стоимость двигателя велики, так как необходимо значительное число полюсов для обеспечения перемещения на заданном отрезке пути.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с. и напряжение в якоре равна нулю, поэтому Iп = U / Rя.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 – 20 раз и более номинальный. Это может вызвать значительные электродинамические усилия в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью пусковых реостатов – активных сопротивлений, включаемых в цепь якоря.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
где U — напряжение питающей сети; Iя — ток якоря; R я — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко: он неэкономичен, скорость двигателя при этом значительно зависит от колебаний нагрузки. Механические характеристики, которые при этом получаются, показаны на рисунке .
Механические характеристики электродвигателя постоянного тока при различных способах регулирования частоты вращения
Жирная прямая — это естественная зависимость скорости от момента на валу, или , что то же, от тока якоря. Прямая естественной механической характеристики несколько отклоняется от горизонтальном штриховой линии. Это отклонение называют нестабильностью, нежесткостью, иногда статизмом. Группа непаралельных прямых I соответствует регулированию скорости возбуждением, параллельные прямые II получаются в результате изменения напряжения якоря, наконец, веер III — это результат введения в цепь якоря активного сопротивления.
Величину тока возбуждения двигателя постоянного тока можно регулировать с помощью реостата или любого устройства, активное сопротивление которого можно изменять по величине, например транзистора. При увеличении сопротивления в цепи ток возбуждения уменьшается, частота вращения двигателя увеличивается. При ослаблении магнитного потока механические характеристики располагаются выше естественной (т. е. выше характеристики при отсутствии реостата). Повышение частоты вращения двигателя вызывает усиление искрения под щетками. Кроме того, при работе электродвигателя с ослабленным потоком уменьшается устойчивость его работы, особенно при переменных нагрузках на валу. Поэтому пределы регулирования скорости таким способом не превышают 1,25 – 1,3 от номинальной.
Регулирование изменением напряжения требует источника постоянного тока, например генератора или преобразователя. Такое регулирование используют во всех промышленных системах электропривода: генератор – д вигатель постоянного тока (Г – ДПТ), электромашинный усилитель – двигатель постоянного тока (ЭМУ – ДПТ), магнитный усилитель – двигатель постоянного тока (МУ – ДПТ), тиристорный преобразователь – двигатель постоянного тока (Т – ДПТ).

Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Динамическое торможение электродвигателя постоянного тока осуществляется путем замыкания обмотки якоря двигателя накоротко или через резистор. При этом электродвигатель постоянного тока начинает работать как генератор , преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
 Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда э. д. с, наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г – ДПТ и ЭМУ – ДПТ.
Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Электродвигатели
- Основные параметры электродвигателя
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Механическая характеристика
- Сравнение характеристик электродвигателей
- Области применения электродвигателей
- Производители электродвигателей
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является – электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Конструкция электродвигателя
Основными компонентами вращающегося электродвигателя являются статор и ротор. Статор – неподвижная часть, ротор – вращающаяся часть.

У большей части электродвигателей ротор располагается внутри статора. Электродвигатели у которых ротор находится снаружи статора называются электродвигателями обращенного типа.
Принцип работы электродвигателя




-
Подробное описание принципа работы электродвигателей разных типов:
- Принцип работы однофазного асинхронного электродвигателя
- Принцип работы трехфазного асинхронного электродвигателя
- Принцип работы синхронного электродвигателя
Классификация электродвигателей
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, – датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока – электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ – коллекторный двигатель постоянного тока
- БДПТ – бесколлекторный двигатель постоянного тока
- ЭП – электрический преобразователь
- ДПР – датчик положения ротора
- ВРД – вентильный реактивный двигатель
- АДКР – асинхронный двигатель с короткозамкнутым ротором
- АДФР – асинхронный двигатель с фазным ротором
- СДОВ – синхронный двигатель с обмоткой возбуждения
- СДПМ – синхронный двигатель с постоянными магнитами
- СДПМП – синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ – синхронный двигатель со встроенными постоянными магнитами
- СРД – синхронный реактивный двигатель
- ПМ – постоянные магниты
- ЧП – частотный преобразователь
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина – вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором [1]. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.

Универсальный электродвигатель

Коллекторный электродвигатель постоянного тока
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина – вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов [1].

Асинхронный электродвигатель
- Однофазный
- Двухфазный

Cинхронный электродвигатель
- С обмоткой возбуждения
- С постоянными магнитами
- Реактивный
- Гистерезисный
- Реактивно-гистерезисный
- Шаговый
Специальные электродвигатели

Серводвигатель
Основные параметры электродвигателя
- Момент электродвигателя
- Мощность электродвигателя
- Коэффициент полезного действия
- Номинальная частота вращения
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
- Механическая характеристика
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) – векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
 ,
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
 ,
,
- где Pном – номинальная мощность двигателя, Вт,
- nном – номинальная частота вращения, мин -1 [4]
Начальный пусковой момент – момент электродвигателя при пуске.
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя – это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность – физическая величина, показывающая какую работу механизм совершает в единицу времени.
 ,
,
- где P – мощность, Вт,
- A – работа, Дж,
- t – время, с
Работа – скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы [2].
 ,
,
- где s – расстояние, м
Для вращательного движения
 ,
,
- где – угол, рад,
 – угол, рад,
– угол, рад, ,
,
- где – углавая скорость, рад/с,
 – углавая скорость, рад/с,
– углавая скорость, рад/с,Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя – характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
 ,
,
- где – коэффициент полезного действия электродвигателя,
- P1 – подведенная мощность (электрическая), Вт,
- P2 – полезная мощность (механическая), Вт
 – коэффициент полезного действия электродвигателя,
– коэффициент полезного действия электродвигателя,-
При этом потери в электродвигатели обусловлены:
- электрическими потерями – в виде тепла в результате нагрева проводников с током;
- магнитными потерями – потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями – потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями – потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Частота вращения

- где n – частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции – скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
 ,
,
- где J – момент инерции, кг∙м 2 ,
- m – масса, кг
1 oz∙in∙s 2 = 0,007062 kg∙m 2 (кг∙м 2 )
Момент инерции связан с моментом силы следующим соотношением
 ,
,
- где – угловое ускорение, с -2 [2]
 – угловое ускорение, с -2 [2]
– угловое ускорение, с -2 [2] ,
,
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) – напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики [3].
Электрическая постоянная времени
Электрическая постоянная времени – это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
- где – постоянная времени, с
 – постоянная времени, с
– постоянная времени, сМеханическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
Коллекторный электродвигатель постоянного тока
- Основные параметры электродвигателя постоянного тока
- Характеристики коллекторного электродвигателя постоянного тока
Конструкция коллекторного электродвигателя постоянного тока
Статор — неподвижная часть двигателя.
Индуктор (система возбуждения) — часть коллекторной машины постоянного тока или синхронной машины, создающая магнитный поток для образования момента. Идуктор обязательно включает либо постоянные магниты либо обмотку возбуждения. Индуктор может быть частью как ротора так и статора. В двигателе, изображенном на рис. 1, система возбуждения состоит из двух постоянных магнитов и входит в состав статора.
Якорь — часть коллекторной машины постоянного тока или синхронной машины, в которой индуктируется электродвижущая сила и протекает ток нагрузки [2]. В качестве якоря может выступать как ротор так и статор. В двигателе, показанном на рис. 1, ротор является якорем.
Щетки — часть электрической цепи, по которой от источника питания электрический ток передается к якорю. Щетки изготавливаются из графита или других материалов. Двигатель постоянного тока содержит одну пару щеток или более. Одна из двух щеток соединяется с положительным, а другая — с отрицательным выводом источника питания.
Коллектор — часть двигателя, контактирующая со щетками. С помощью щеток и коллектора электрический ток распределяется по катушкам обмотки якоря [1].
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть с постоянными магнитами и с обмотками возбуждения.
Коллекторный двигатель с постоянными магнитами

Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. Индуктор этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора . КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
-
Преимущества:
- лучшее соотношение цена/качество
- высокий момент на низких оборотах
- быстрый отклик на изменение напряжения
-
Недостатки:
- постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
-
По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:
- независимого возбуждения
- последовательного возбуждения
- параллельного возбуждения
- смешанного возбуждения




Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой якоря (рисунок выше). Обычно напряжение возбуждения UОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы [3].
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается. При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
-
Преимущества:
- практически постоянный момент на низких оборотах
- хорошие регулировочные свойства
- отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
-
Недостатки:
- дороже КДПТ ПМ
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет механическую характеристику с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с КДПТ ПМ, двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным. Недостатками двигателя параллельного возбуждения являются более высокая себестоимость и возможность выхода двигателя из под контроля, в случае если ток индуктора снизится до нуля, что в свою очередь может привести к поломке двигателя [5].
Двигатель последовательного возбуждения
В электродвигателях последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря, при этом ток возбуждения равен току якоря (Iв = Iа), что придает двигателям особые свойства. При небольших нагрузках, когда ток якоря меньше номинального тока (Iа < Iном) и магнитная система двигателя не насыщена (Ф
Iа), электромагнитный момент пропорционален квадрату тока в обмотке якоря:
 ,
,
- где M – момент электродвигателя, Н∙м,
- сМ – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- Ф – основной магнитный поток, Вб,
- Ia – ток якоря, А.
С ростом нагрузки магнитная система двигателя насыщается и пропорциональность между током Iа и магнитным потоком Ф нарушается. При значительном насыщении магнитный поток Ф с ростом Iа практически не увеличивается. График зависимости M=f(Ia) в начальной части (когда магнитная система не насыщена) имеет форму параболы, затем при насыщении отклоняется от параболы и в области больших нагрузок переходит в прямую линию [3].


Способность двигателей последовательного возбуждения развивать большой электромагнитный момент обеспечивает им хорошие пусковые свойства.
-
Преимущества:
- высокий момент на низких оборотах
- отсутствие потерь магнетизма со временем
-
Недостатки:
- низкий момент на высоких оборотах
- дороже КДПТ ПМ
- плохая управляемость скоростью из-за последовательного соединения обмоток якоря и индуктора
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный двигатель последовательного возбуждения имеет высокий момент на низких оборотах и развивает высокую скорость при отсутствии нагрузки. Данный электромотор идеально подходит для устройств, которым требуется развивать высокий момент (краны и лебедки), так как ток и статора и ротора увеличивается под нагрузкой. В отличии от КДПТ ПМ и двигателей параллельного возбуждения двигатель последовательного возбуждения не имеет точной характеристики контроля скорости, а в случае короткого замыкания обмотки возбуждения он может стать не управляемым.
Двигатель смешанного возбуждения
Двигатель смешанного возбуждения имеет две обмотки возбуждения, одна из них включена параллельно обмотке якоря, а вторая последовательно. Соотношение между намагничивающими силами обмоток может быть различным, но обычно одна из обмоток создает большую намагничивающую силу и эта обмотка называется основной, вторая обмотка называется вспомогательной. Обмотки возбуждения могут быть включены согласовано и встречно, и соответственно магнитный поток создается суммой или разностью намагничивающих сил обмоток. Если обмотки включены согласно, то характеристики скорости такого двигателя располагаются между характеристиками скорости двигателей параллельного и последовательного возбуждения. Встречное включение обмоток применяется, когда необходимо получить неизменную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя смешанного возбуждения приближаются к характеристикам двигателя параллельного или последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет главную роль [4].
-
Преимущества:
- хорошие регулировочные свойства
- высокий момент на низких оборотах
- менее вероятен выход из под контроля
- отсутствие потерь магнетизма со временем
-
Недостатки:
- дороже других коллекторных двигателей
Двигатель смешанного возбуждения имеет эксплуатационные характеристики двигателей с параллельным и последовательным возбуждением. Он имеет высокий момент на низких оборотах, так же как двигатель последовательного возбуждения и хороший контроль скорости, как двигатель параллельного возбуждения. Двигатель смешанного возбуждения идеально подходит для устройств автомобилей и промышленности (таких как генераторы). Выход двигателя смешанного возбуждения из под контроля менее вероятен, так как для этого ток параллельной обмотки возбуждения должен уменьшиться до нуля, а последовательная обмотка возбуждения должна быть закорочена.
Характеристики коллекторного электродвигателя постоянного тока
Эксплуатационные свойства двигателей постоянного тока определяются их рабочими, электромеханическими и механическими характеристиками, а также регулировочными свойствами.

Основные параметры электродвигателя постоянного тока
Постоянная момента
Для коллекторного электродвигателя постоянного тока постоянная момента определяется по формуле:
 ,
,
- где Z – суммарное число проводников,
- Ф – магнитный поток, Вб [1]





